Deep convnets for image recognition
Convolutional Neural Nets: Introduction¶
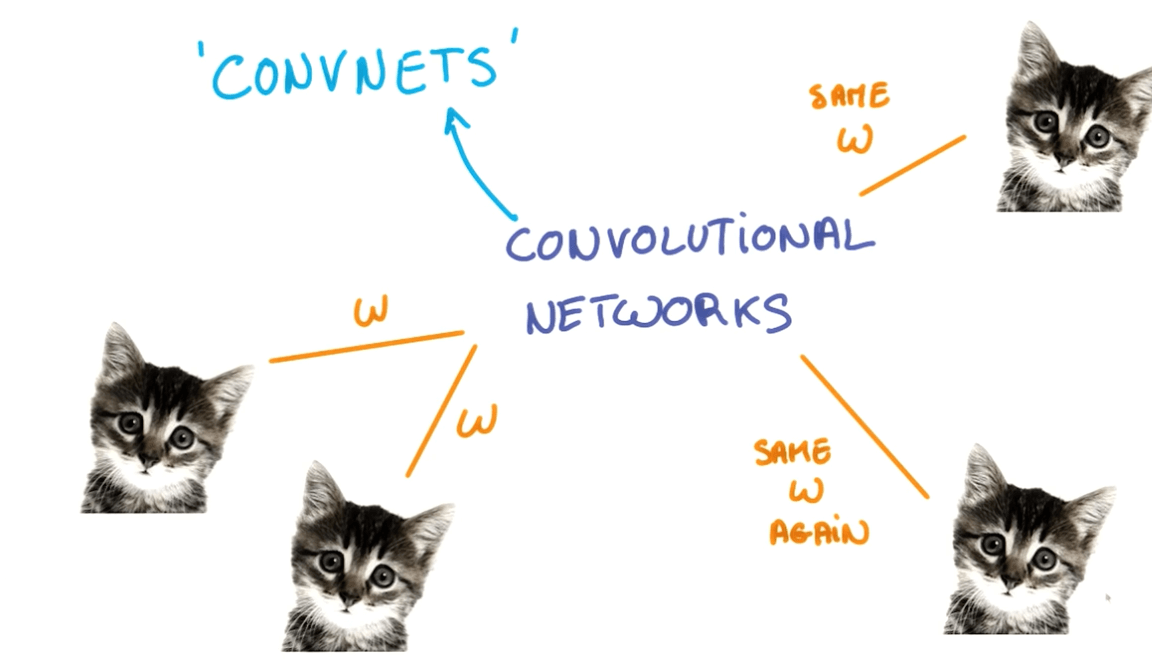
Translation Invariance
- Image
- Different positions
- Same objects
- Text
- Kitten in a long text
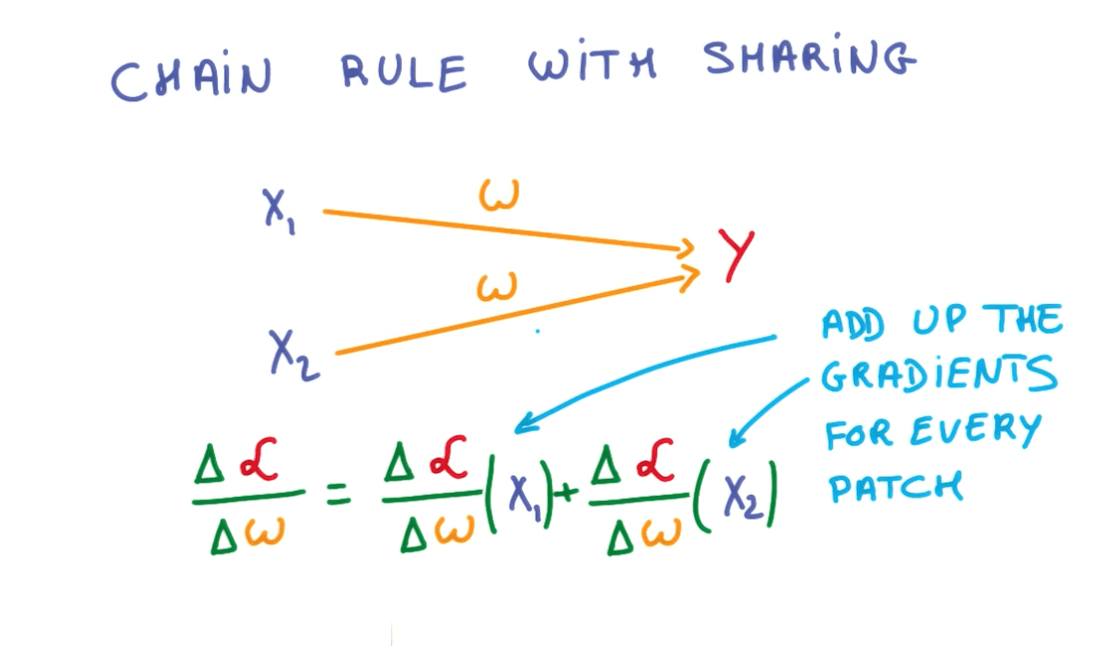
- You can use weight sharing and train them jointly for those inputs
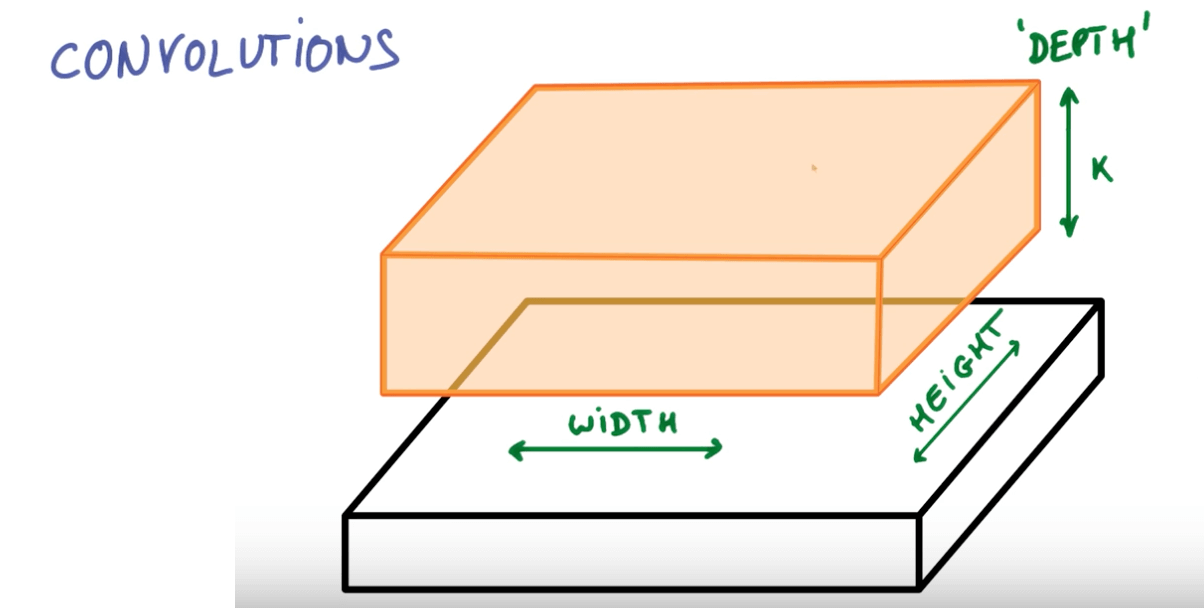
Convnets
- Neural networks that share their parameters across space
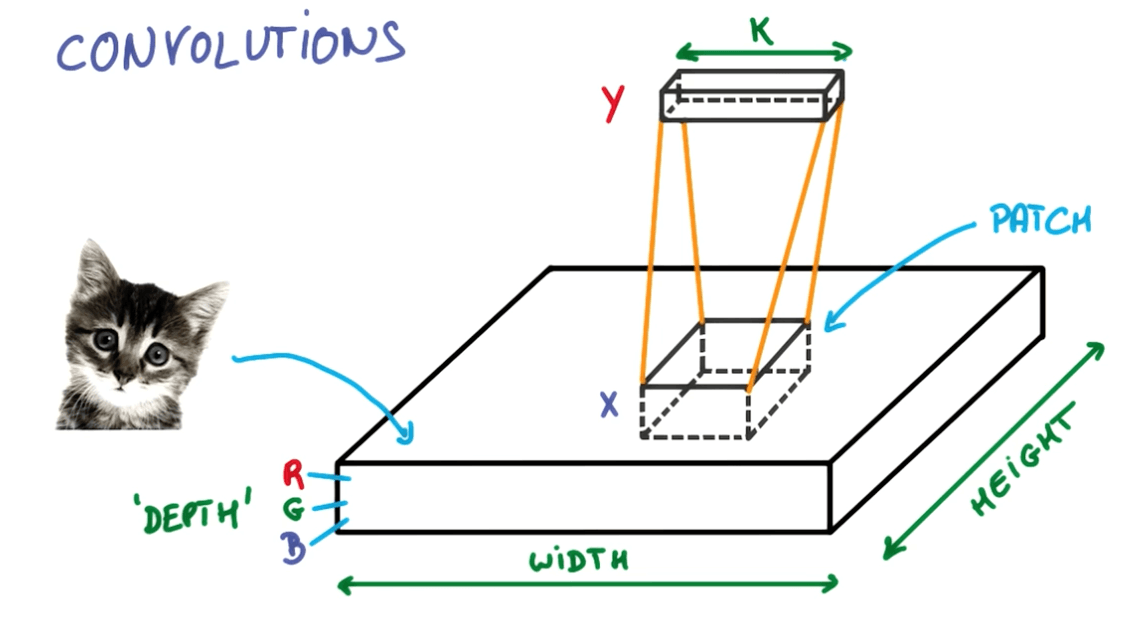
- We take a portion of the image and run a neural network.
- We then slide the neural network across the image
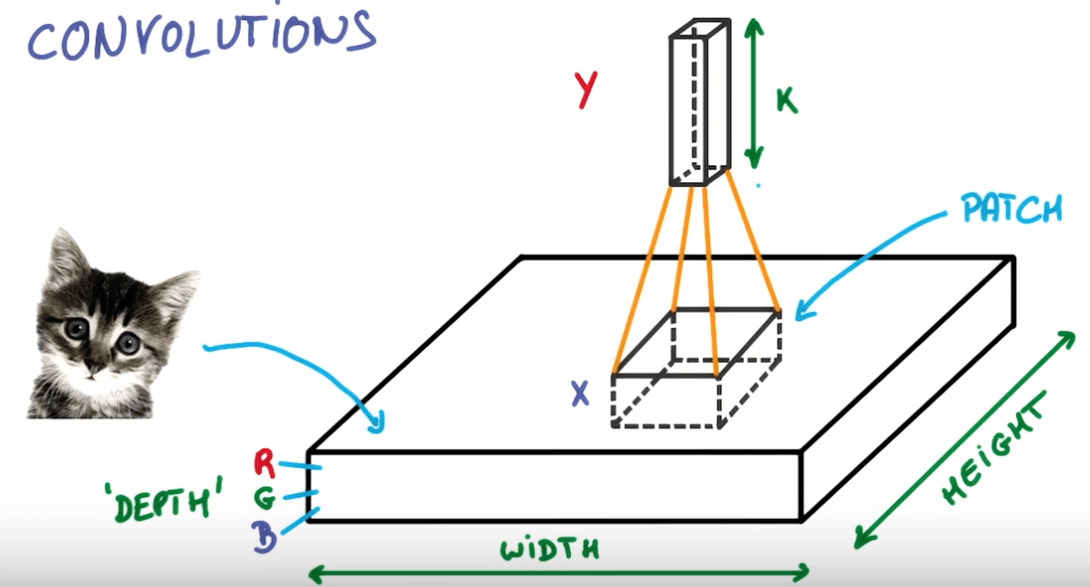
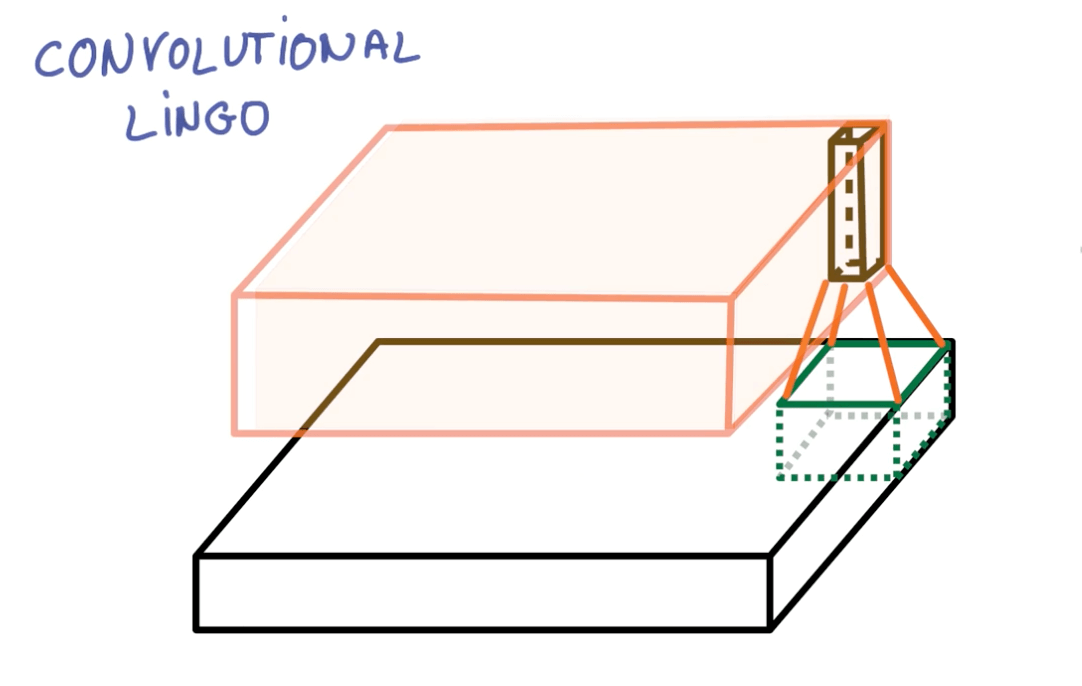
- Here you can see we've a layer that has a deeper depth but smaller space.
- We will slide the neural network on this layer that will again increase the depth and reduce the space.
- We continue to do this until we've reached a stage of maximum depth k where k are the outputs we want.
- Instead of having stacks of matrix multipliers, we would have stacks of convolutions.
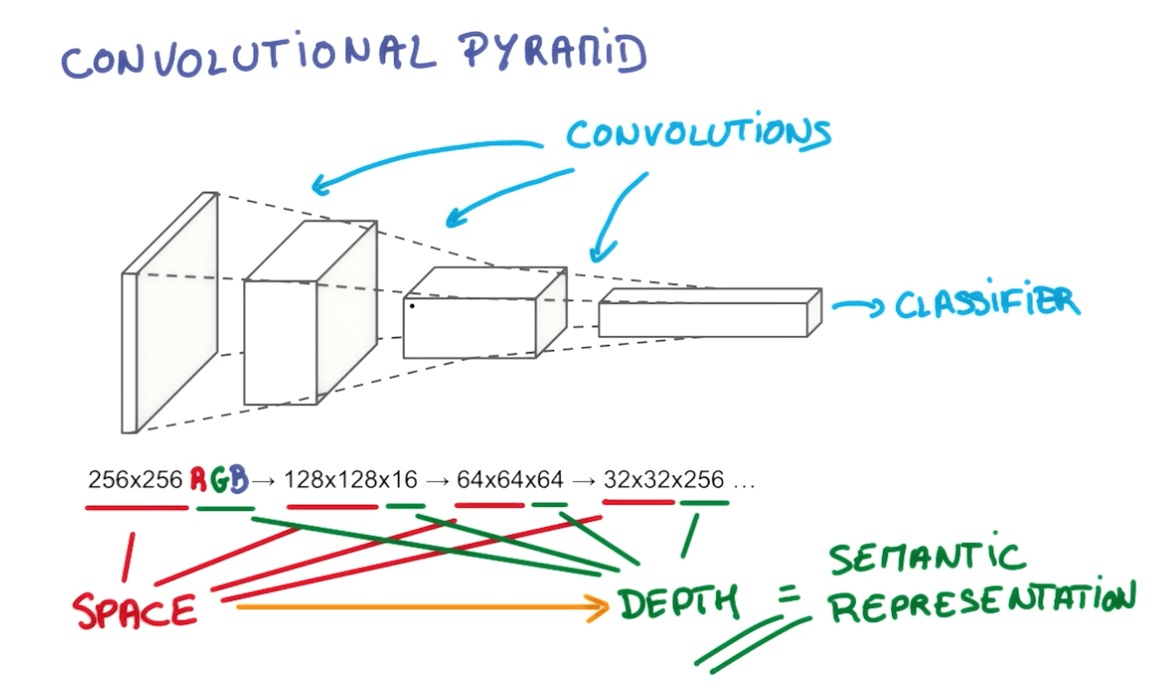
- Here you can see we're trying to reduce the space and increase the depth.
Convnets Terms
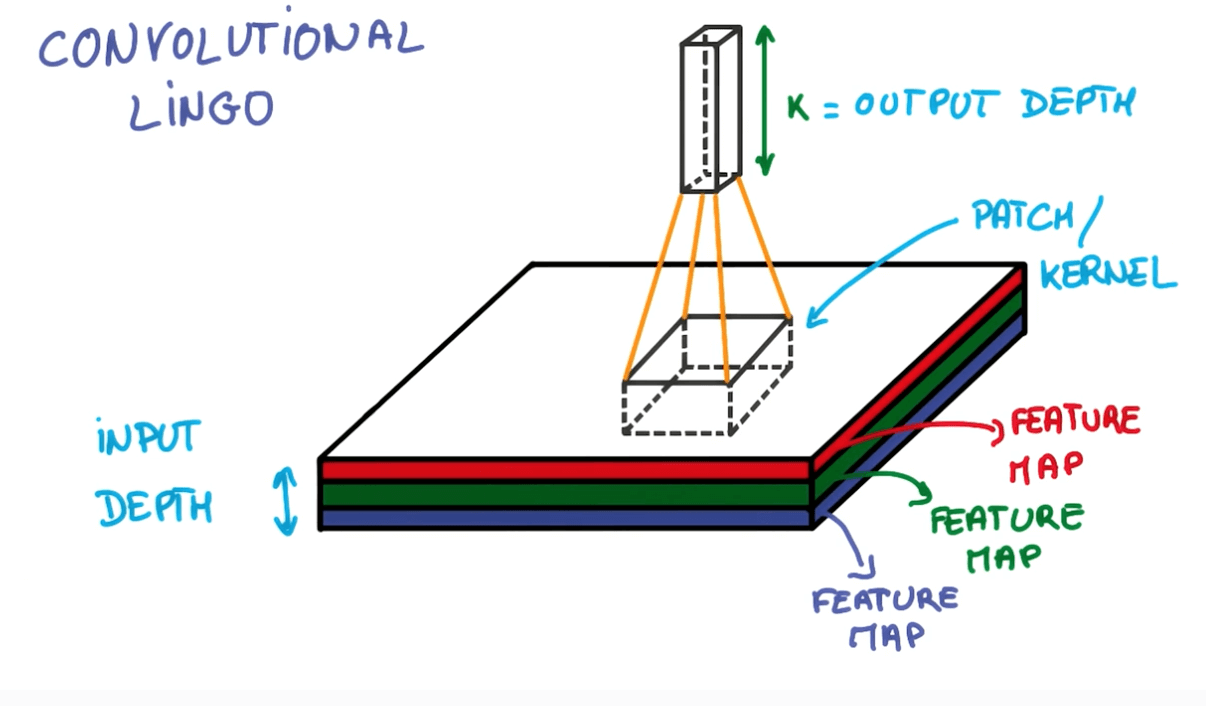
- Strides
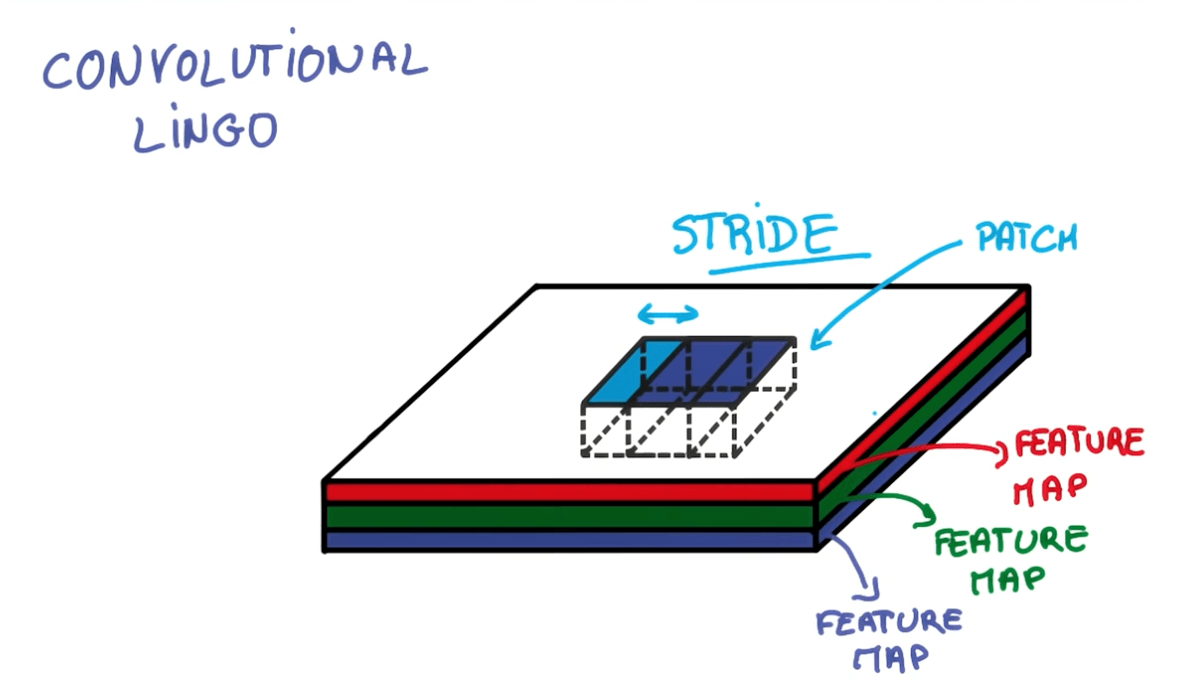
- Where stride is the number of pixels that we are shifting.
- Stride: 1
- Output same size as input
- Stride: 2
- Output roughly half the size
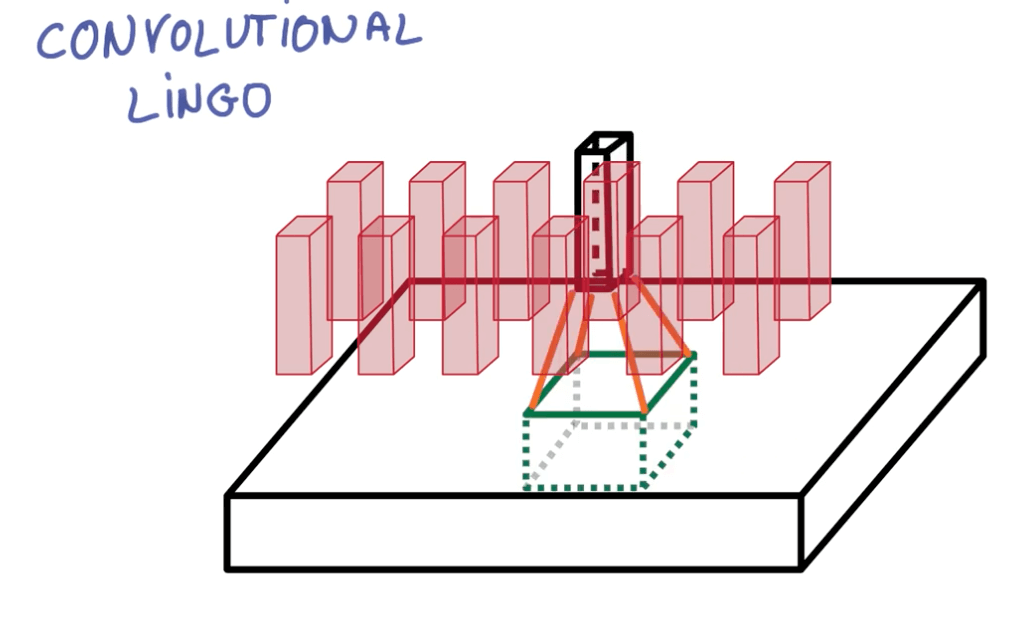
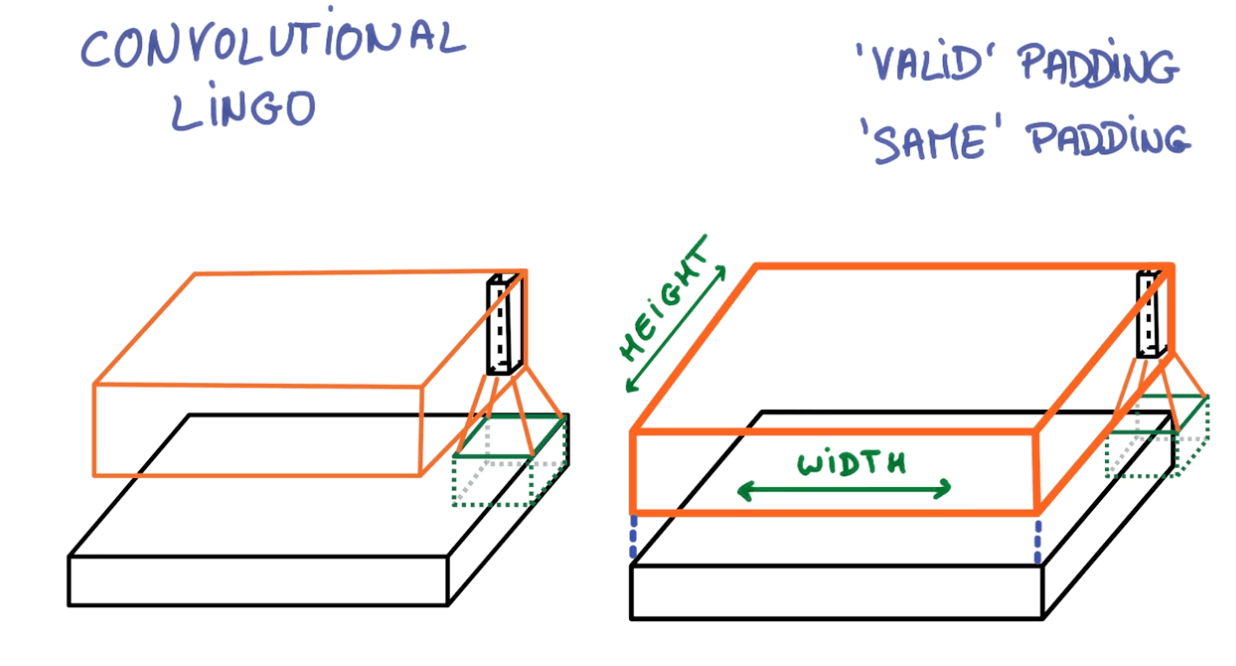
- Paddings
- Left: valid padding
- Right: same padding
Strides, depth and padding
- Imagine you have 28x28 image.
- You run a 3x3 convolution on it.
- Input depth: 3
- Output depth: 8
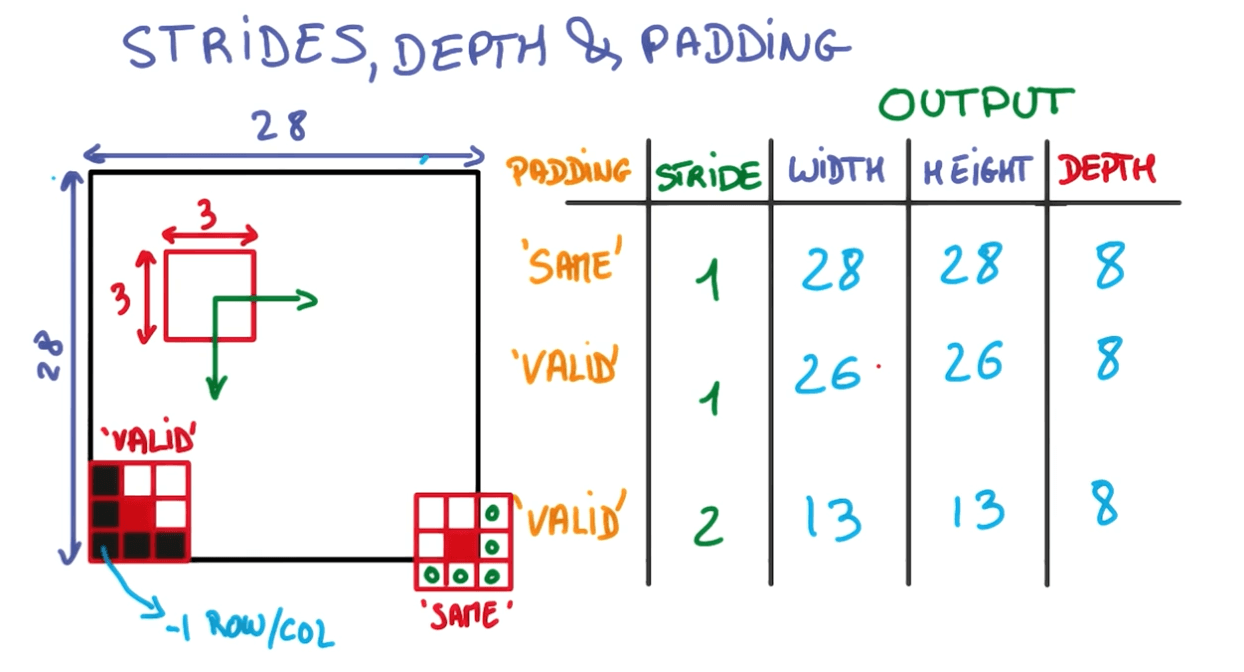
- For stride: 1 and padding: same (1)
- You would have the exact same dimensions.
- You would be taking a F x F x D_input dot-product to come up with a number.
- For stride: 1 and padding: valid (0)
- You would have one less row and column
- For stride: 2 and padding: valid (0)
- You would have half the output.
- For stride: 1 and padding: same (1)
Calculating Output Size
- $O = \frac {W - K - 2P} {S} + 1 $
- O is the output height/length
- W is the input height/length
- K is the filter size (kernel size)
- P is the padding
- S is the stride
Padding Size
- In general it's common to see same (zero) padding, stride 1 and filters of size FxF.
- Zero-padding = $\frac {F - 1}{2}$
- If you do not pad (same padding), you would decrease the width and height of your layers gradually.
- This might not be something you want.
- If you do not pad (same padding), you would decrease the width and height of your layers gradually.
Depth
- Number of filters = depth.
- We try to keep this in powers of two.
- 32, 64, 128, 512 etc.
- This is for computational reasons.
Number of Parameters
- Number of parameters in layer = (F x F x D_input + 1) x D_filter
- Where F is the filter size
- D_input is the depth of the input layer
- 1 is the bias
- D_filter is the depth of the filter
- Parameters per filter: (F x F x D_input + 1)
Convolution Networks
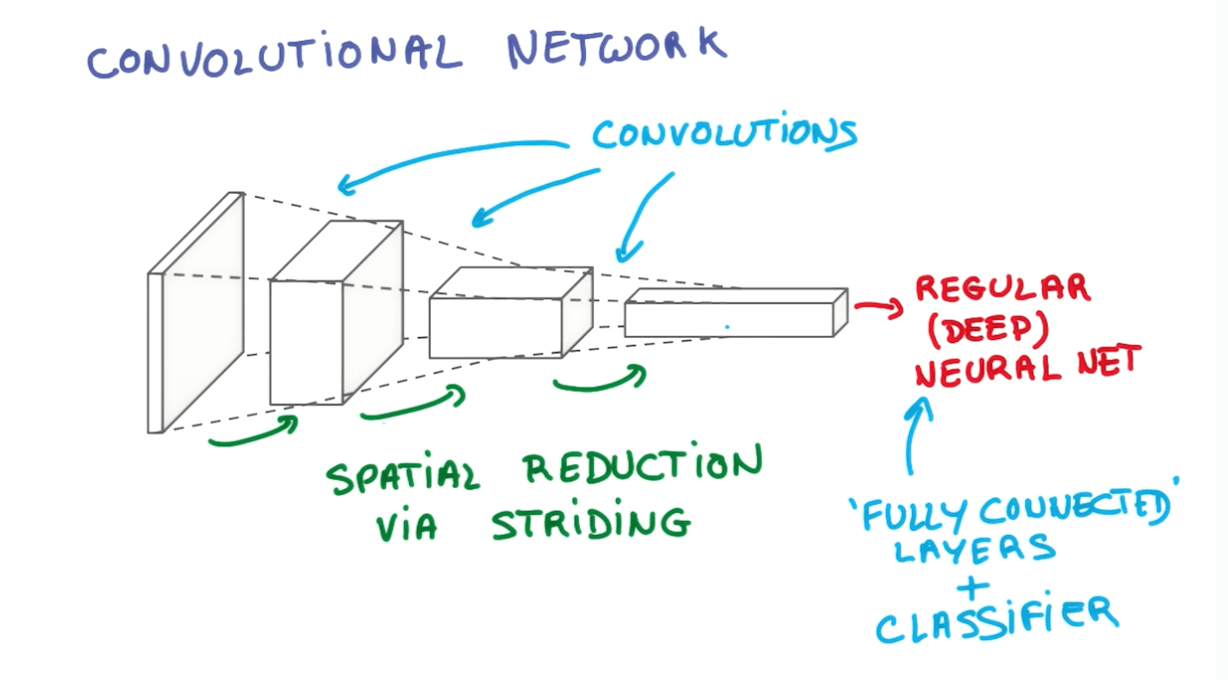
- Fully Connected (FC) Layer
- Basically it connects to the entire input volume like a neural network.
- Final layer after we have done all our convolutions.
- ReLU Layers
- Remember there are ReLU Layers after every Conv and FC.
- Fully Connected (FC) Layer
Advanced convnet-ology
- Pooling
- 1 x 1 convolutions
- Inception
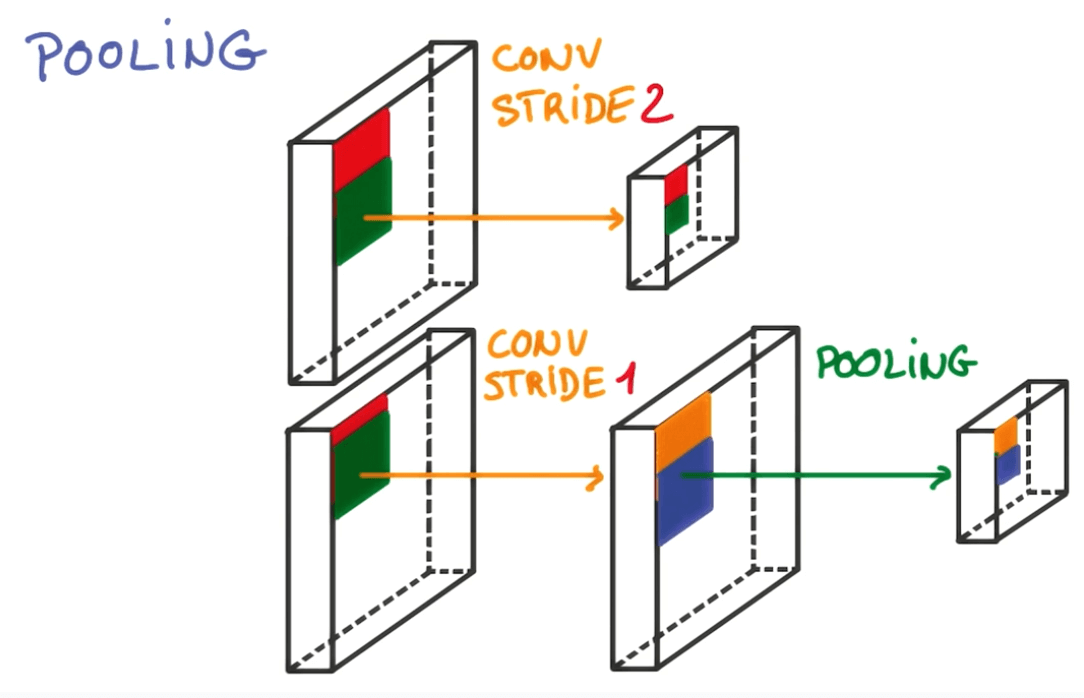
Pooling
- Striding
- We shift the filter by a few pixel each time.
- This is very aggressive method that removes a lot of information.
- Pooling
- We can take a smaller stride.
- Take all the convolutions in the neighbors.
- Combine them somehow, and this is called pooling.
- We will be preserving the depth.
- But we will be reducing the width and height.
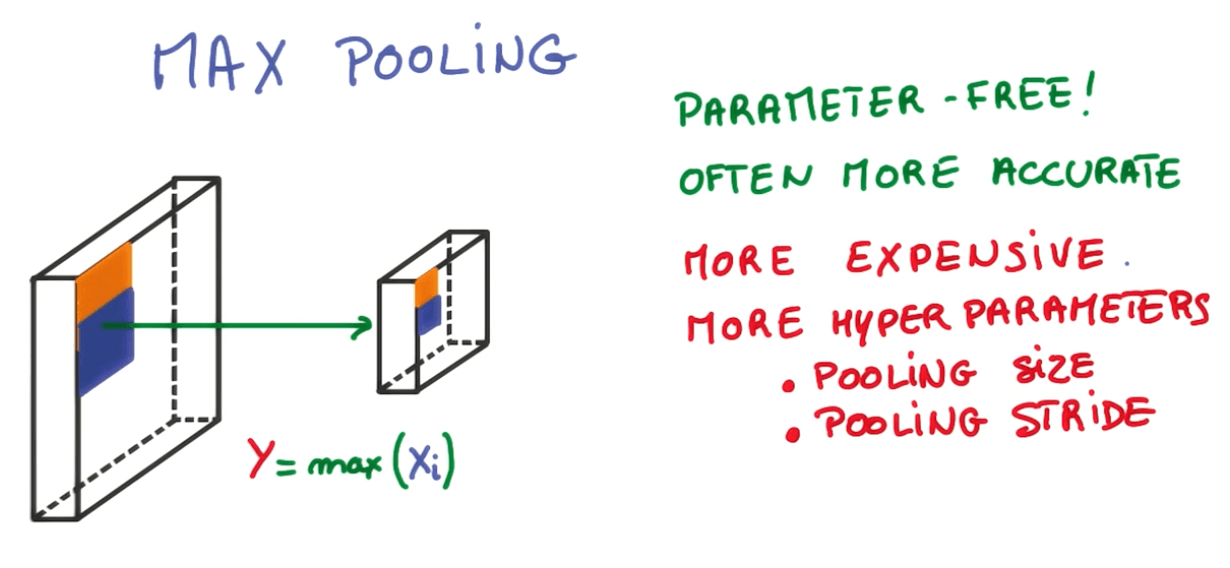
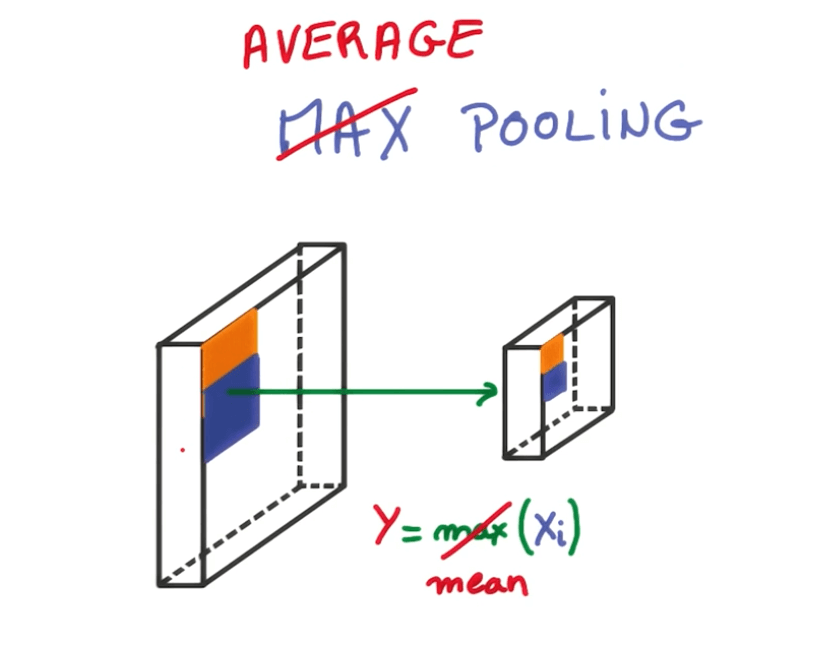
- Max Pooling
- At every point in a feature map, look at a small neighborhood around that point and compute the maximum of all the responses around it.
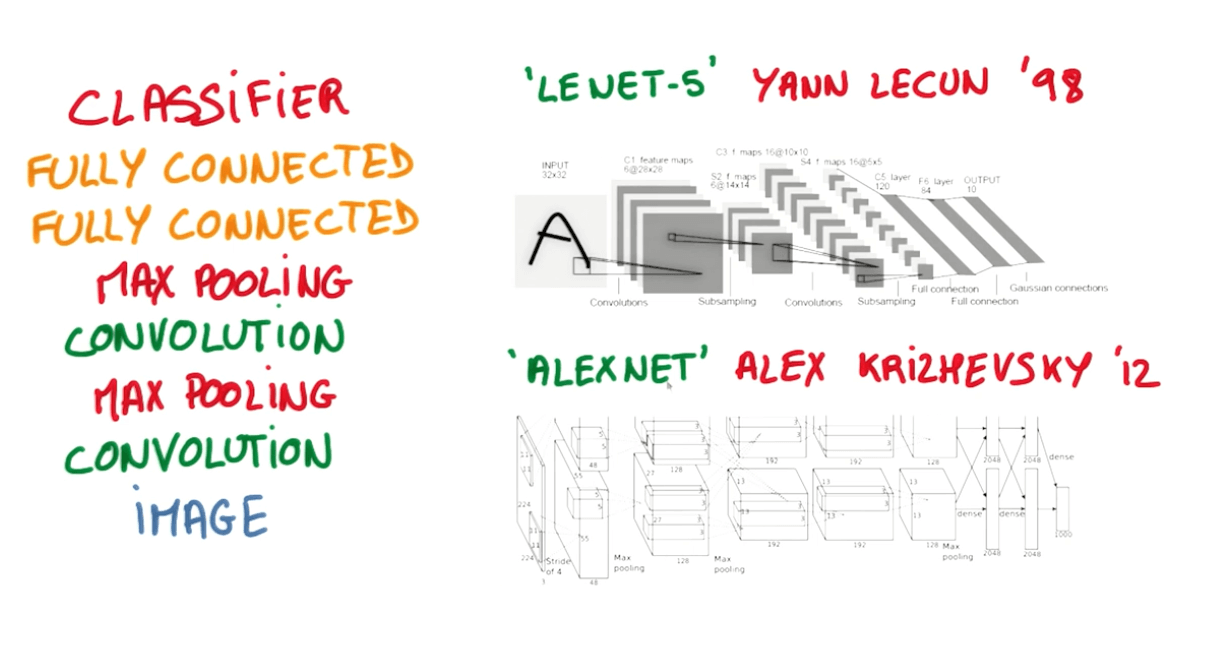
- Typical architecture
- Max Pooling
- Average pooling
- Instead oftaking the max, we take the average.
- It's similar to taking a blurred, low-resolution, view of the feature map.
- Average pooling
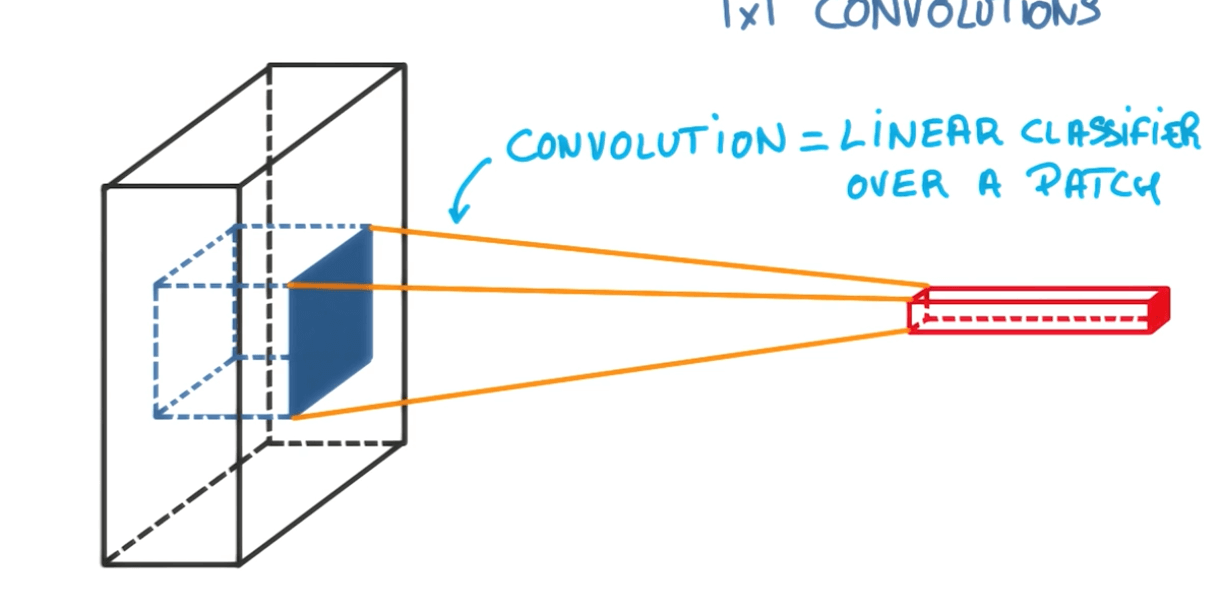
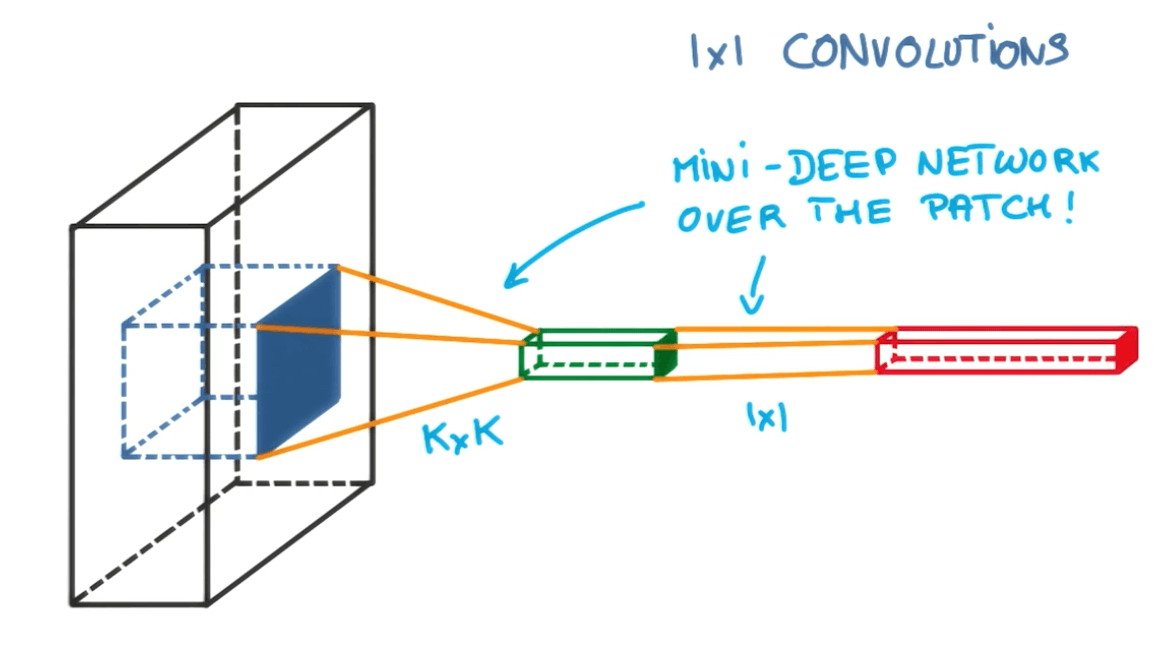
1x1 Convolutions
- Here we are using only 1 pixel by 1 pixel.
- Traditional.
- Now we add a 1x1 convolution.
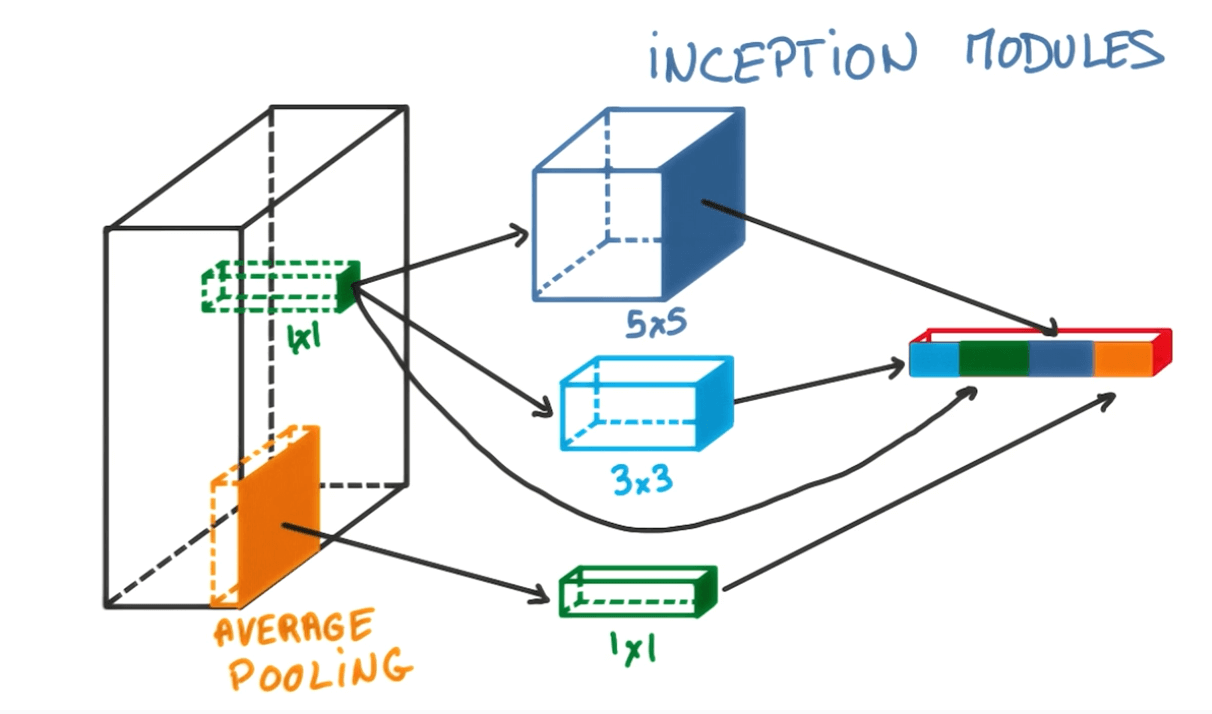
Inception Module
- This is like an ensemble of methods.
Evaluation of results
- We can use accuracy to evaluate the predicted values and our labels.
- But a better method would be to use the top-1 and top-5 errors.
Progress in Convs (in order of lower top-1 and top-5 errors)
- LeNet-5
- AlexNet
- ZFNet
- VGGNet
- GoogLeNet
- ResNet
- As of September 2016, this is the latest state-of-the-art implementation for convs.
Further Readings
- Convolution Arithmetic for Deep Learning
- A Beginner’s Guide To Understanding Convolutional Neural Networks Part 1
- A Beginner’s Guide To Understanding Convolutional Neural Networks Part 2
- CS231n Winter 2016 Lecture 7 Convolutional Neural Networks Video
- CS231n Winter 2016 Lecture 7 Convolutional Neural Networks Lecture Notes